
NEWS
12/16-12/19 パシフィコ横浜で開催される SIGGRAPH ASIA 2009 Emerging Technologies に出展します.

[ET0068] Daichi's artworking: Enjoyable painting and handcrafting with new ToolDevices
- ◇展示スケジュール
- 12/17 (Thu.) 09:30-18:30
12/18 (Fri.) 09:30-18:30
12/19 (Sat.) 09:30-16:00
- ◇会場
- Exhibition Hall B
※ なお,12/18 (Fri.) 09:00-10:45にはRoom 413にて口頭発表を行います.
詳細ページIntroduction
空間型作業(ここで言う「空間型」は複合現実感技術を利用する立体視可能なシステムや広視野ディスプレイ,プロジェクタ投影タイプ(テーブル型など)を含む)に幅広く用いられ,直観的に利用できるような,新しい道具型の対話デバイスを各種提案・提供することを目的に研究を進めています.
道具型デバイスは,
(1) 慣れ親しんだ既存の道具の形状とその道具ならではの触感・操作音を活用
⇒操作感を高め,仮想物体の存在感を強めることが可能
(2) 現実世界と同様,目的に応じて異なった道具に持ち替えて利用できるツールセット
⇒ユーザを正しい操作に導くだけでなく,直観的な操作を提供
という2つの特徴があります.
デバイスの実現にあたり,マウスと2Dディスプレイが苦手とする作業として,設計・レイアウト,立体造形などを想定し,それらを実現する操作として「選択・移動」「加工」「描画」の3種類に絞り込み,デバイスを開発しています.現在は,「選択・移動」用のピンセット型デバイス,道具型デバイスを実現する新しい方式の先端着脱式道具型デバイス(「加工」用のナイフ/ハンマ型デバイス),「描画」用の筆型デバイスの開発を行っています.
Devices
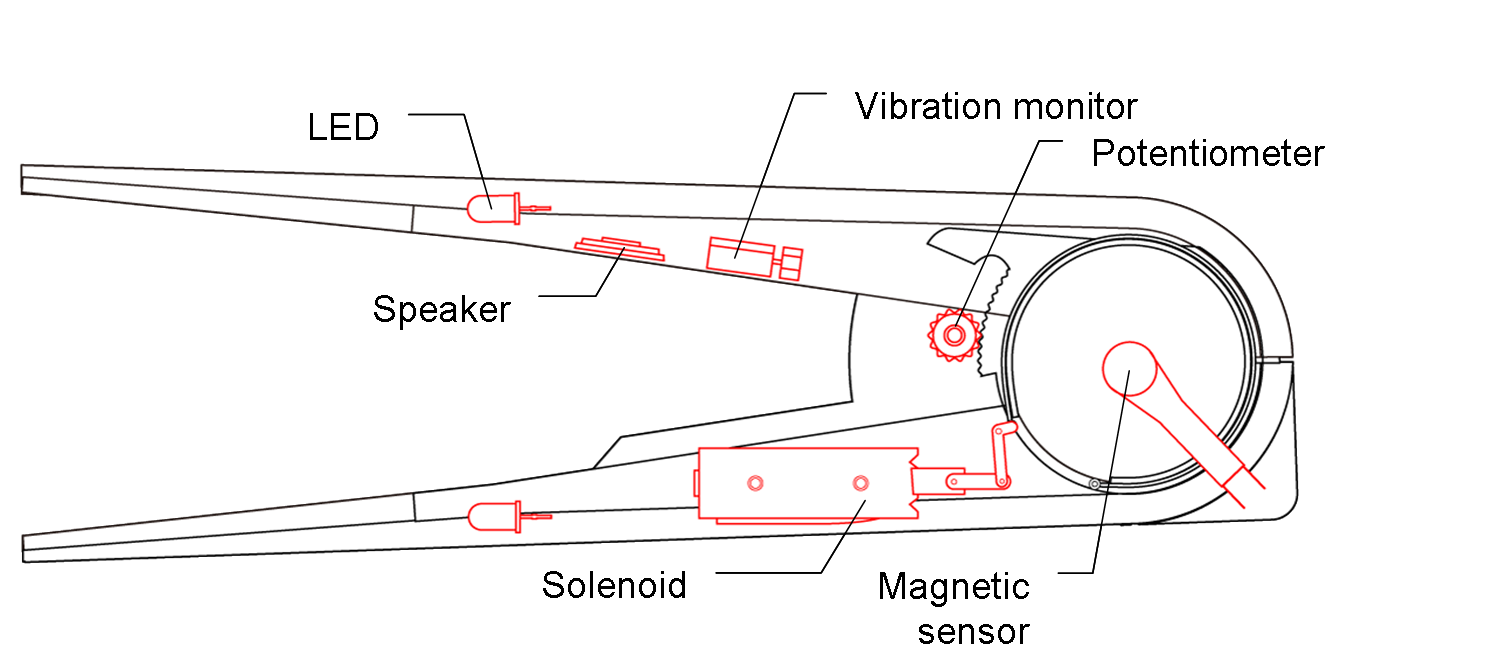
TweezersDevice
「選択・移動」操作のためのピンセット型デバイスです.
■仮想物体を操作するための機構
【位置姿勢検出】仮想物体がピンセット型デバイスで挟める位置にあるかどうかを判定したり,ピンセット型デバイスで選択中の仮想物体をデバイスに追従して表示するために磁気センサを利用
【挟み幅検出】仮想物体を挟んだかどうかの判定に利用するため回転式のポテンショメータを利用
■操作結果の応答,確認を視・聴・触力覚に対して提示するための機構
【視覚提示】先端部分にRGB 3色のLEDを内蔵
【聴覚提示】仮想物体と接触したことで音が発生したように印象付けるため,デバイス内部に小型スピーカを内蔵
【反力提示】挟んでいる対象の大きさや硬さ・軟らかさに応じた反力を提示するためドラムブレーキを根元部分に内蔵
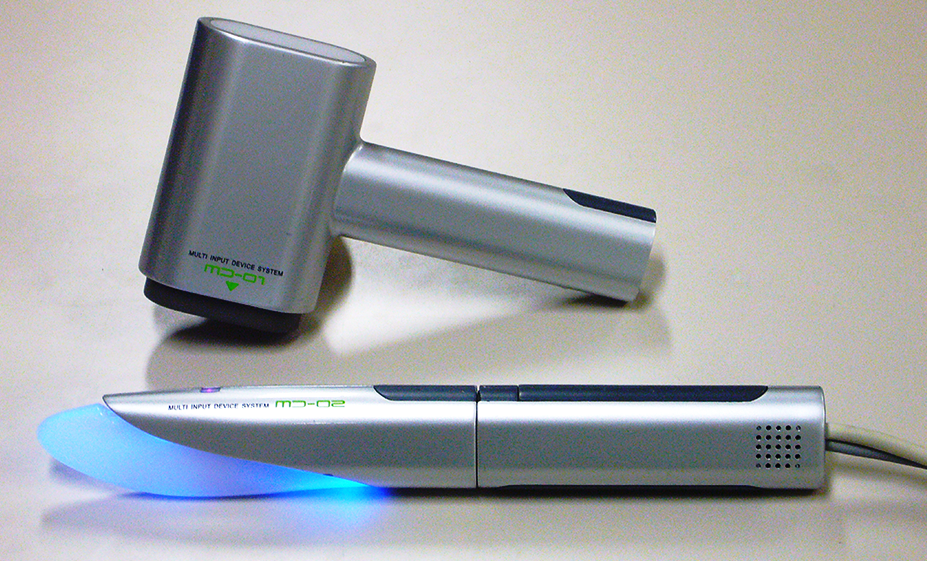
Knife/HummerDevice
「加工」用のナイフ/ハンマ型デバイスです.
電気掃除機のアタッチメントのような感覚で先端部を着脱,交換することで機能を切り替える「先端着脱方式」を採用しています.各道具で共通な柄を「本体」として一つだけ実現し,道具それぞれの機能は柄の先端に接続する「着脱部」として実現しました.
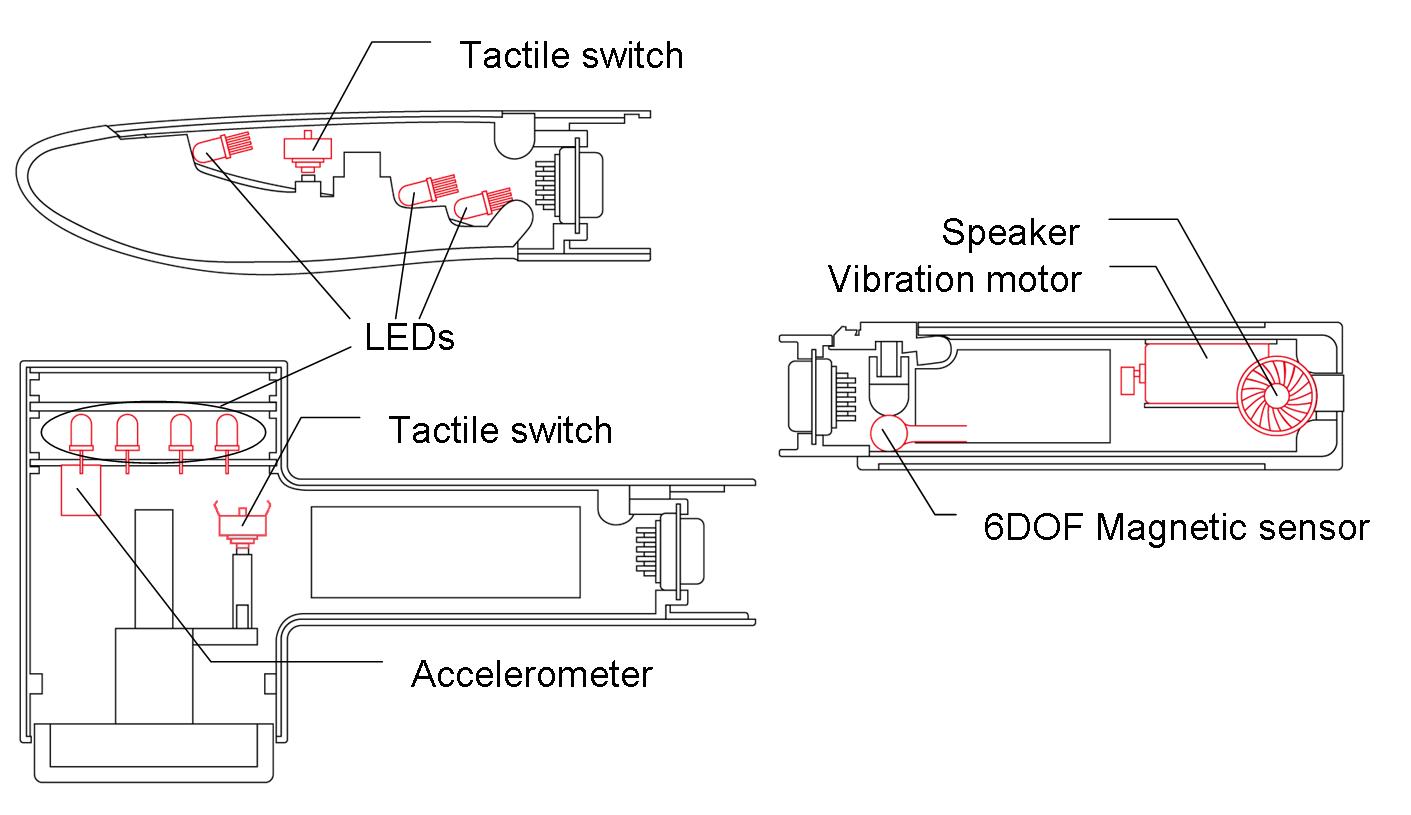
【着脱部ID識別】着脱部−本体接続コネクタの4つのピンを利用し,各ピンのON/OFFの組み合わせで合計16種類(「何も接続していない状態」を含む)のID識別が可能
■本体の内蔵機構
【位置姿勢検出】デバイスが仮想物体を操作可能な位置にあるかを判定するために磁気センサを利用
【聴覚提示】デバイスが仮想物体と接触したことで音が発生したように印象付けるため小型スピーカを内蔵
【触覚提示】仮想物体を「切る」「叩く」操作をした際の触感を提示するため振動モータを内蔵
■着脱部(ナイフ,ハンマ共通)
【接触判定】実物との接触を検出する機能.ナイフでは刃の部分,ハンマでは頭部の片側に内蔵された2段階タクトスイッチを接触部分が押下することで,デバイスが操作面に接触した際の強さ検出を行う
【視覚提示】ナイフでは刃の部分が,ハンマでは接触部の反対側にRGB 3色のLEDを複数内蔵
■着脱部(ハンマのみ)
【加速度検出】叩く際の振り下ろし速度を検出するために3軸加速度センサを内蔵
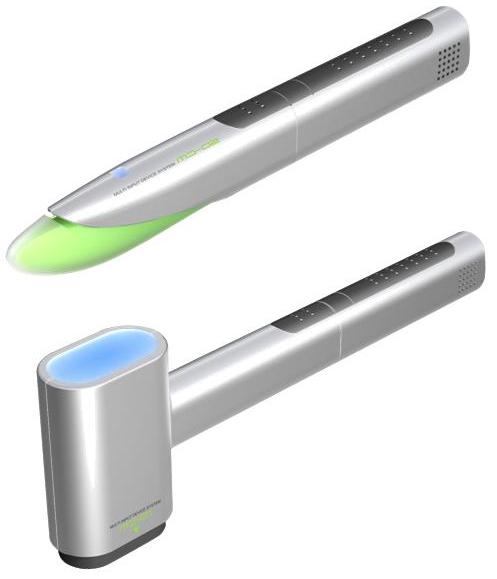
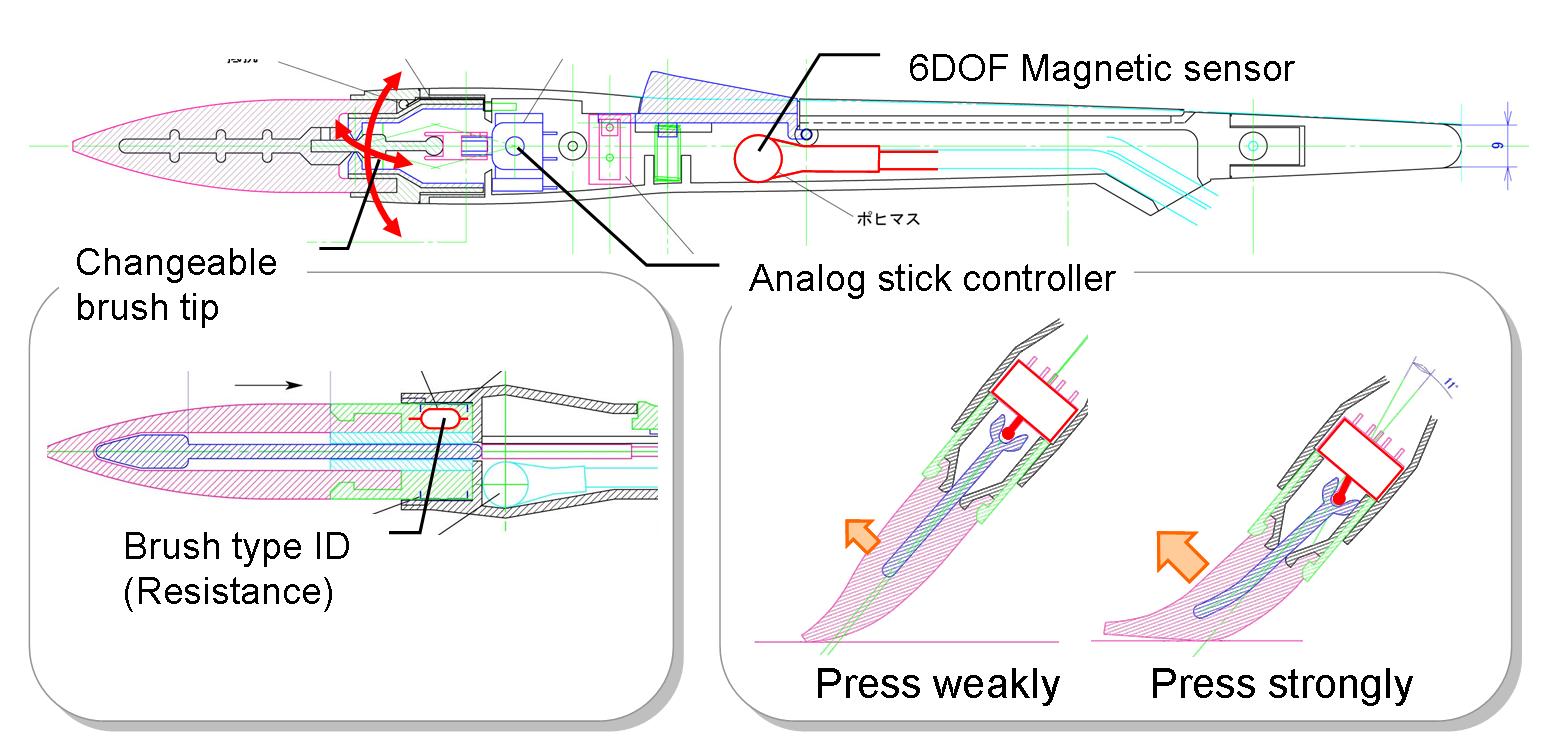
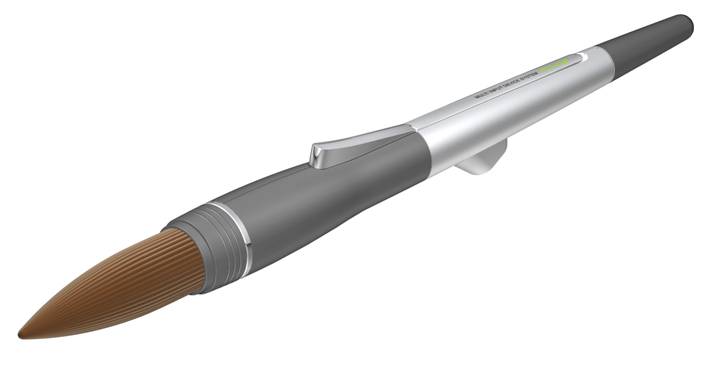
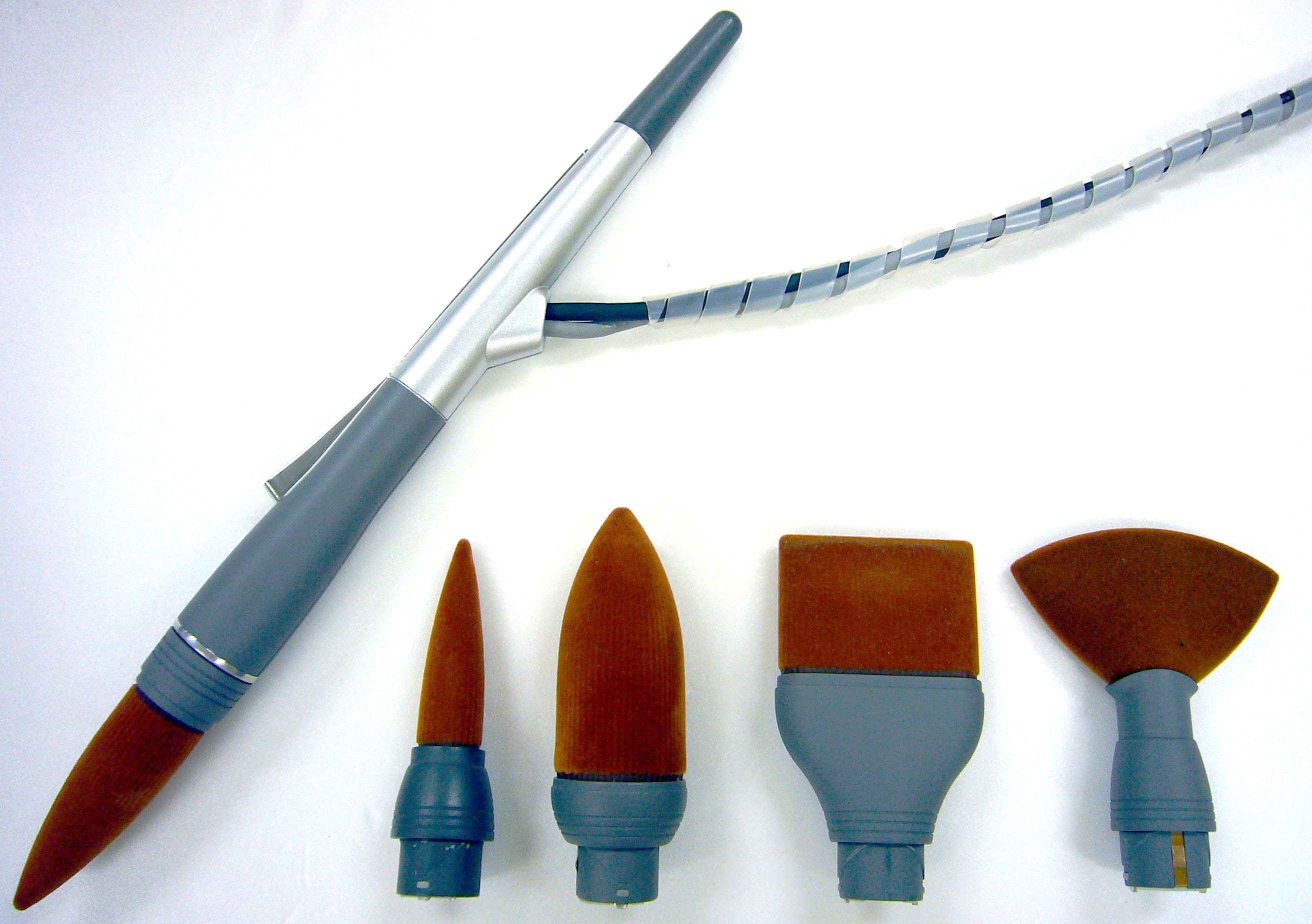
BrushDevice
「描画」用の筆型デバイスです.
ナイフ/ハンマ型デバイスと同様に,描画したい線に応じて先端部を付け替えることが可能な「先端着脱方式」を採用しています.
【着脱部ID識別】穂先に内蔵された固定抵抗の値によって現在接続されている先端のID識別を行う
【位置姿勢検出】穂先が描画対象のどこに触れているかを決定するため磁気センサを利用
【しなり量検出】穂先のしなり量に応じて描画する線の太さを変更するため,軸にアナログスティックコントローラを内蔵
Videos and Images
Videos



Images
※画像クリックで大きいサイズの画像が開きます
Publications
Paper
--- 2009年度 ---
 ● 木村朝子,上坂晃雅,柴田史久,田村秀行:空間型作業での選択・移動操作に適した道具型デバイスの機能設計と評価, 情報処理学会論文誌, 採録決定.
● 木村朝子,上坂晃雅,柴田史久,田村秀行:空間型作業での選択・移動操作に適した道具型デバイスの機能設計と評価, 情報処理学会論文誌, 採録決定.
● 石黒祥生,木村朝子,柴田史久,田村秀行:複合現実空間操作用対話デバイスのためのハイブリッド型位置姿勢決定法, 日本バーチャルリアリティ学会論文誌, Vol. 14,No. 3, pp. 381 - 389 (2009.9)
--- 2008年度 ---
● 平沼真吾,木村朝子,柴田史久,田村秀行:ジェスチャ操作を用いる広視野電子作業空間の複数人分担・協調作業への拡張,ヒューマンインタフェース学会論文誌,Vol. 10,No. 4,pp. 547 - 557 (2008.10)
Oral
--- 2009年度 ---
● Mai Otsuki, Masashi Tsukadaira, Asako Kimura, Fumihisa Shibata, and Hideyuki Tamura: Development of BrushDevice facilitating painting operation in 2D/3D space, Proc. SICE Annu. Conf. 2009, pp. 4323 - 4326 (2009.8)
--- 2008年度 ---
● 福田健悟,木村朝子,柴田史久,田村秀行:Top-AttachableToolDevice: 先端部が着脱可能な新しい道具型デバイス,第71回情報処理学会全国大会講演論文集 (4),2Y-2, pp. 163 - 164 (2009.3)
● 新田孝宏,上坂晃雅,木村朝子,柴田史久,田村秀行:選択・移動操作に適したピンセット型デバイスの操作性評価と考察,第71回情報処理学会全国大会講演論文集 (4),4Y-1, pp. 197 - 198 (2009.3)
● 塚平将司,大槻麻衣,木村朝子,柴田史久,田村秀行:2D/3D空間での描画操作に適した筆型デバイスの開発,第71回情報処理学会全国大会講演論文集 (4),4Y-2, pp. 199 - 200 (2009.3)
● Mai Otsuki, Asako Kimura, Fumihisa Shibata, and Hideyuki Tamura: Novel interaction methods with mixed reality space, Proc. SICE Annu. Conf. 2008, pp. 456 - 460 (2008.8)
--- 2007年度 ---
● 上坂晃雅,木村朝子,柴田史久,田村秀行:複合現実空間との対話操作のための道具型デバイス,電子情報通信学会 パターン認識・メディア理解研究会,信学技報,Vol. 107,No. 427,PRMU2007-170,pp. 81 - 86 (2008.1)
Demo
--- 2009年度 ---
● Mai Otsuki, Masashi Tsukadaira, Asako Kimura, Fumihisa Shibata, and Hideyuki Tamura: Daichi's Painting: Brushing up painting skills with BrushDevice, Adjunct Proc. 22nd Annual ACM Symp. on User Interface Software and Technology (UIST 2009), pp. 1 - 2 (2009.10)
● 高見雄介,木村朝子,柴田史久,田村秀行:道具型デバイスを活用した新しい幾何形状モデリングの実現,ヒューマンインタフェースシンポジウム2009予稿集,pp. 547 - 550 (2009.9)
--- 2008年度 ---
● Akimasa Uesaka, Kengo Fukuda, Asako Kimura, Fumihisa Shibata, and Hideyuki Tamura: TweezersDevice: A device facilitating pick and move manipulation in spatial works, Adjunct Proc. 21st Annual ACM Symp. on User Interface Software and Technology (UIST 2008), pp. 55 - 56 (2008.10)
● 大槻麻衣,高見雄介,塚平将司,木村朝子,柴田史久,田村秀行:空間型作業での選択・移動操作を容易にするピンセット型デバイスの実現,ヒューマンインタフェースシンポジウム2008予稿集,pp. 549 - 552 (2008.9)
--- 2007年度 ---
● 上坂晃雅,木村朝子,柴田史久,田村秀行:空間型作業での選択・移動操作を容易にする道具型デバイス,インタラクション2008,pp. 49 - 50 (2008.3)
Links
SIGGRAPH ASIA 2009
JST デジタルメディア作品の制作を支援する基盤技術
Reality Media Lab.