婡婍峔惉
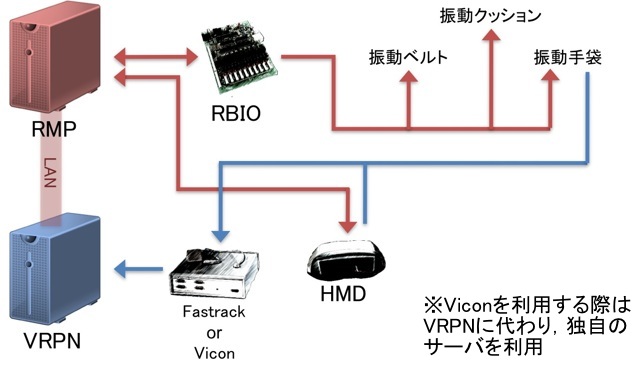
- RMP
- 崱擭搙偐傜摫擖偝傟偨怴僾儔僢僩僼僅乕儉丏MR嬻娫傪峔抸偟昤夋偡傞丏僒乕僶偱偁傞VRPN偐傜偺埵抲巔惃偺忣曬傪庴偗庢傝丆MR嬻娫偵斀塮偝偣傞丏桪傟偨僾儘僙僢僔儞僌僷儚乕傪妶偐偟偰丆僑僉僽儕傪儕傾儖偵嵞尰偟亀婥帩偪埆偝亁傪昞尰偡傞偙偲偵惉岟丏
- VRPN
- 僋儔僀傾儞僩偱偁傞RMP偵壓婰偺埵抲巔惃庢摼梡僙儞僒偐傜庴偗庢偭偨忣曬傪憲傞丏
- 埵抲巔惃庢摼梡僙儞僒
- Fastrack乮帴婥幃僙儞僒乯偲Vicon Bonita乮岝妛幃僙儞僒乯偵懳墳丏懱尡幰偺庤偺埵抲巔惃傪庢摼偡傞丏
- RBIO
- 壓婰偺怳摦僨僶僀僗傪惂屼偡傞丏
- 怳摦僨僶僀僗
- 怳摦庤戃丆怳摦儀儖僩丆怳摦僋僢僔儑儞偺3偮偑懚嵼偡傞丏徻嵶偼亀僨僶僀僗亁偵偰丏