Pitagora MR++
summary
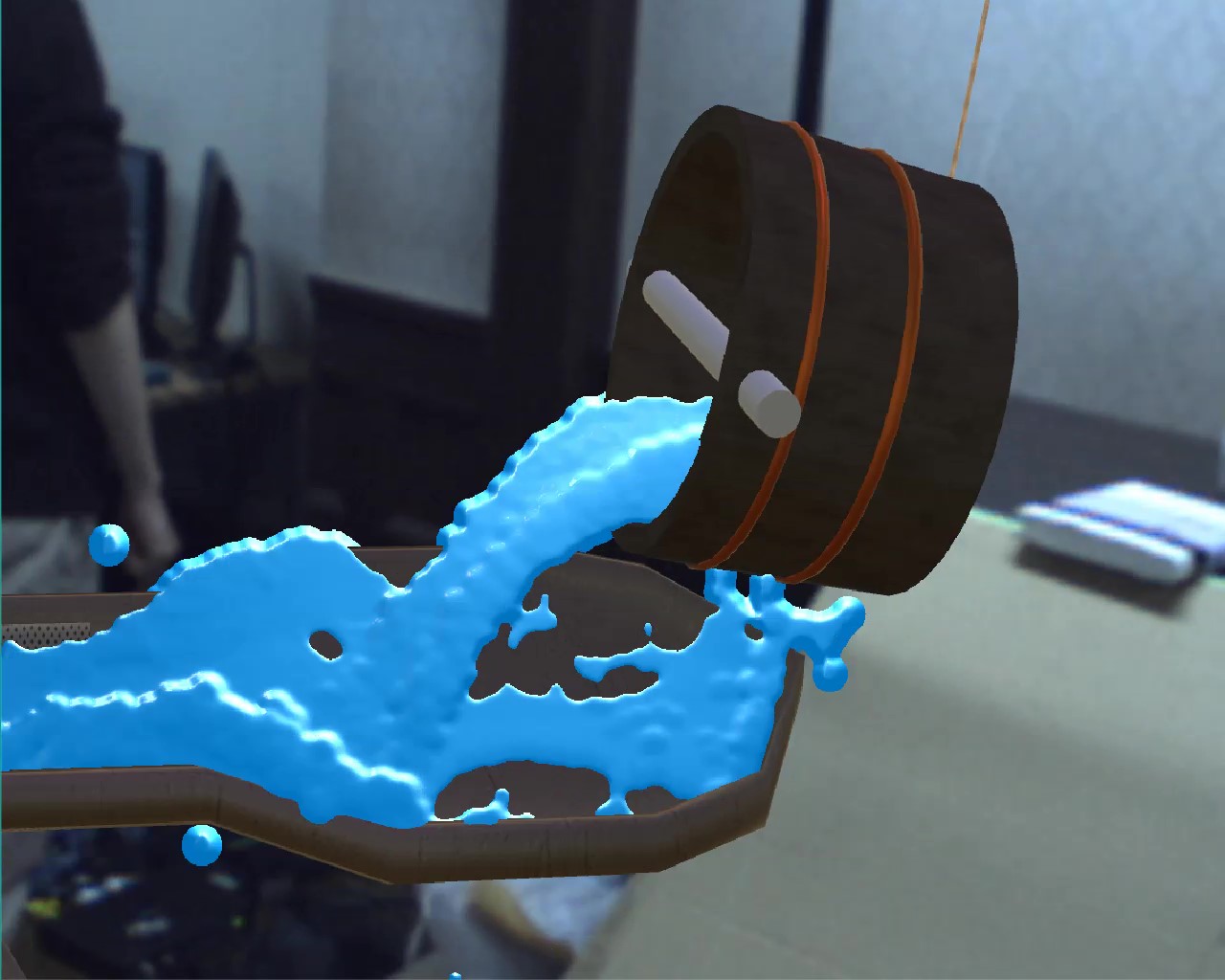
 室内に水!?ベルトコンベア!?
MRピタゴラスイッチが新しくなって再登場!
仮想の水やLEGOを使った見ごたえのあるピタゴラです!
新しいピタゴラスイッチを体験しよう!
室内に水!?ベルトコンベア!?
MRピタゴラスイッチが新しくなって再登場!
仮想の水やLEGOを使った見ごたえのあるピタゴラです!
新しいピタゴラスイッチを体験しよう!
 HMDを装着し,次々と移り変わるピタゴラ装置を追いかけよう!
HMDを装着し,次々と移り変わるピタゴラ装置を追いかけよう!
system

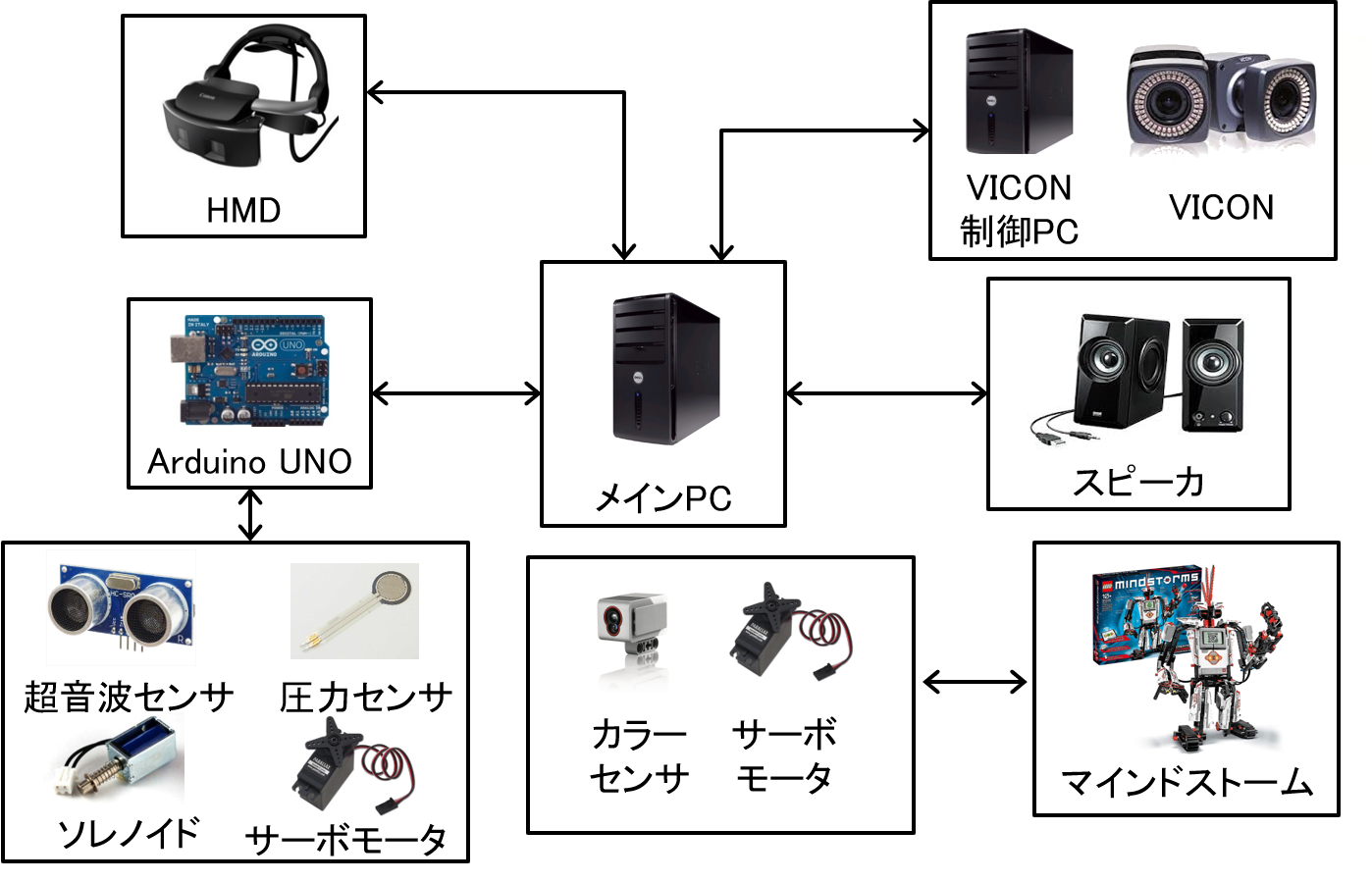
・メインPC
システム全体を制御する.・VICON
体験者の位置姿勢情報を取得する.・HMD
内臓カメラで実空間映像を撮影し,体験者の視界にCGモデルが重畳描画された映像を表示する.・Arduino
汎用入出力ボード.デバイスの制御をする.・超音波センサ
超音波の反射時間を利用して非接触で測距するモジュール.本や車の移動距離を測るために使用する.・サーボモータ
物体を動かすために使用する.レールに取り付けた糸を巻きとるために使用する.・ソレノイド
電圧をかけると中央の棒が移動する.リアルの球を押すために使用する.・圧力センサ
センサ部に圧力を加えると抵抗値が減少する.鉄球の衝突を感知する.・DCモータ
車にとりつけた糸を巻きとるために使用する.・LEGO マインドストーム EV3
スタンドアローンでデバイスを制御する.device
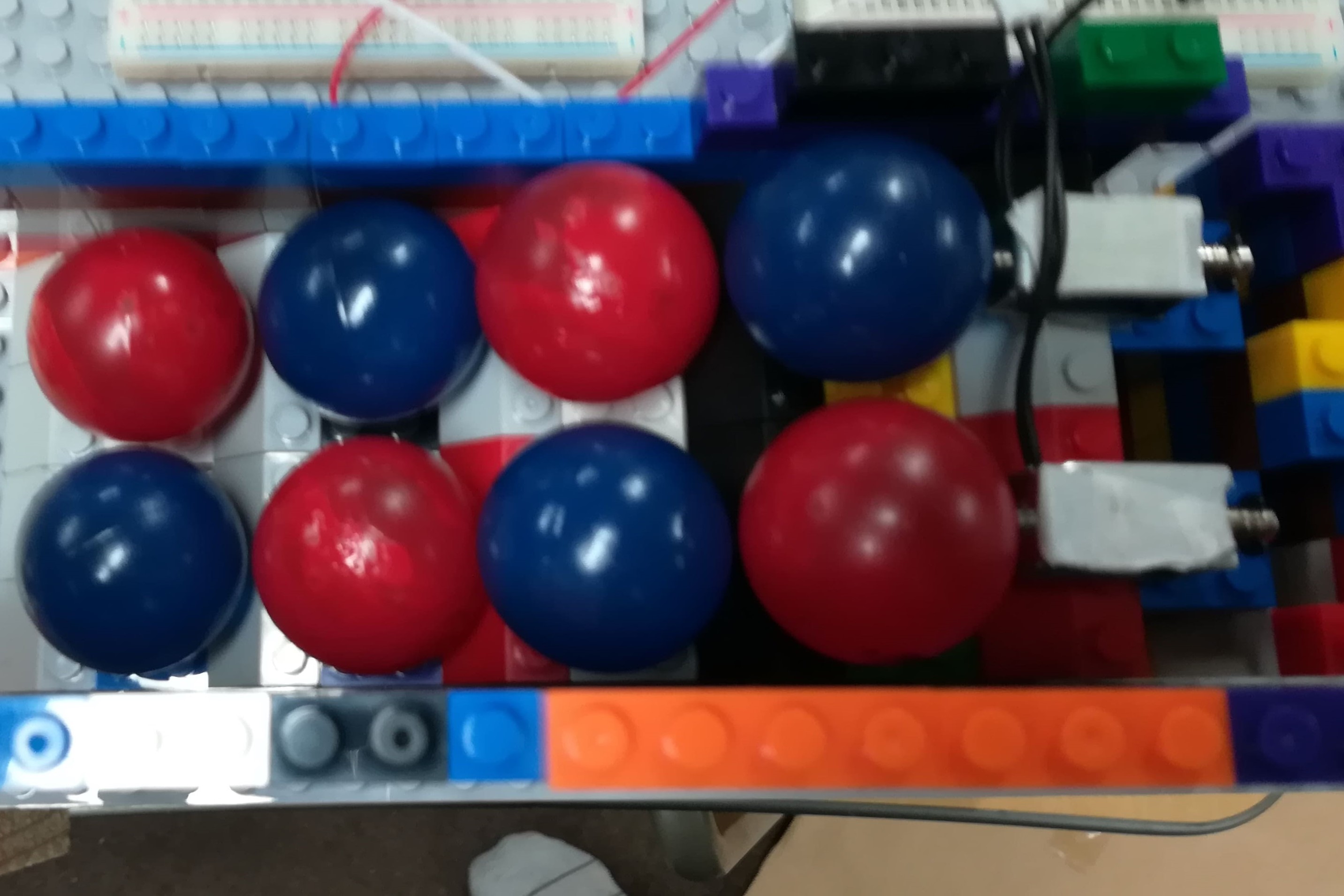
・変換ボックス仮想の球を現実の球に変換するためのデバイス. 仮想の球が箱にすべて入るとソレノイドが片方ずつ作動し, 球をボックス内から押し出す.中は階段状になっているため, 多くの球を一度に出すことができる. |
 |
・色分けコンベアマインドストームで動作するベルトコンベア. カラーセンサとサーボモータが取りつけられており, 球の色を判別して赤球だけを弾き落とすことができる. |
 |
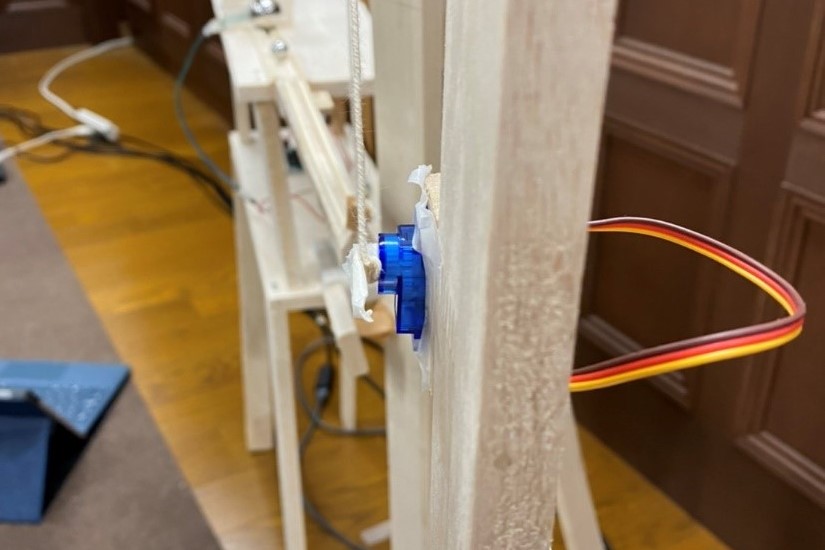
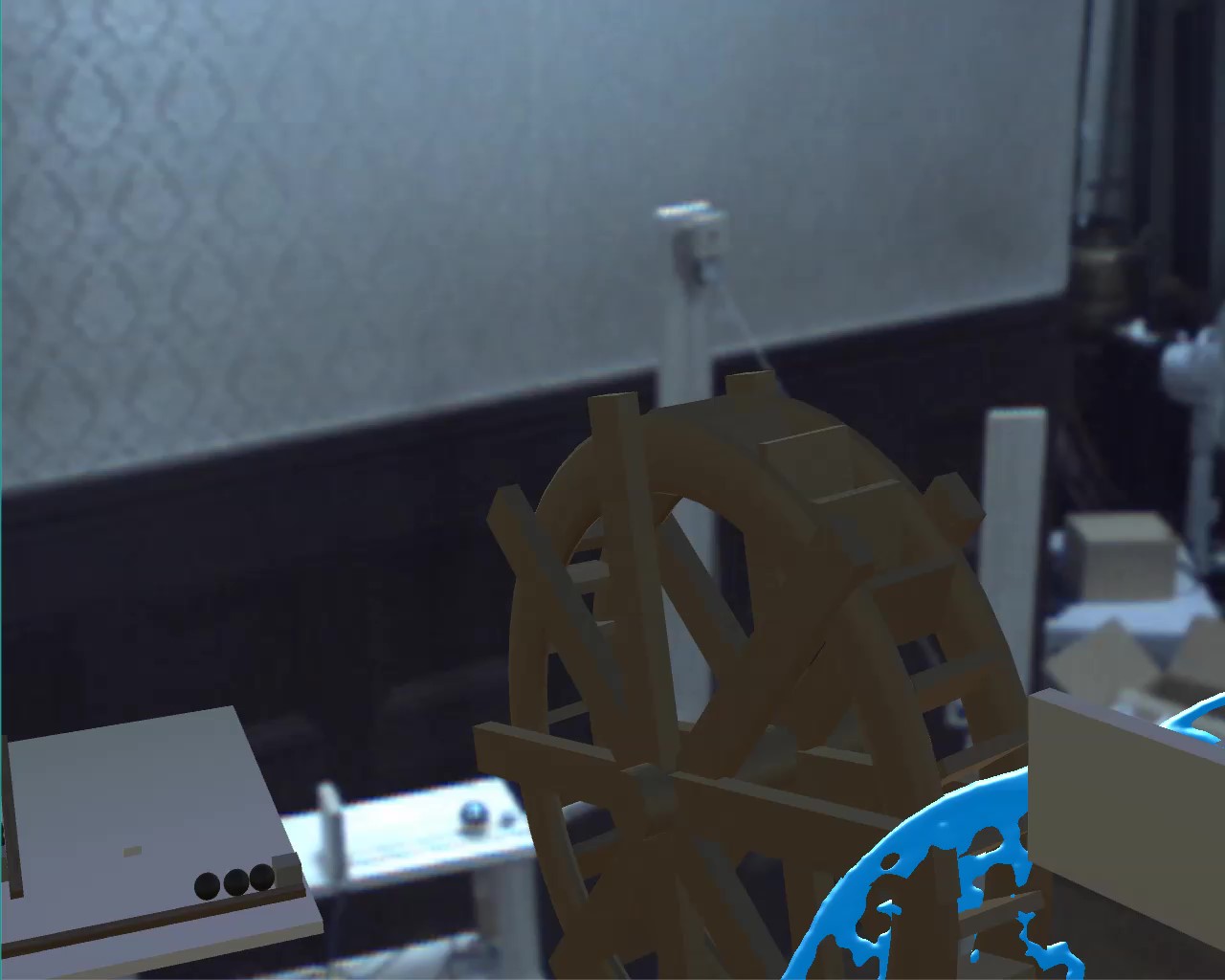
・水車仮想の水車の裏に設置する糸巻き機構. 水が仮想の水車を回しはじめるとサーボモータが糸を 巻きはじめる.糸はレールにつながっている.レール が上がると鉄球が動きだし,次のピタゴラへと続く. |
 |
view


staff
