
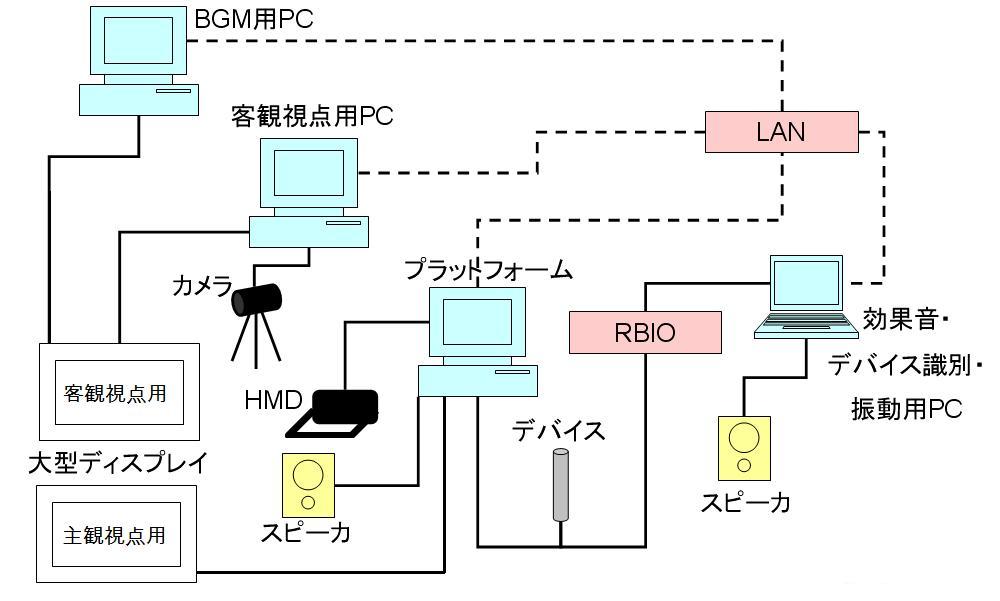
- メインPC(Canon MR Platform)
- 客観視点用PC
- 客観視点用カメラ
- RBIO
- 効果音・デバイス先端部識別・振動用PC
- BGM用PC
- ビデオシースルーHMD
- Fastrak
- ディスプレイ
複合現実空間を管理します.
メインPCとシーングラフを共有し,客観視点用カメラが映した実空間に仮想物体を合成します.
第三者が複合現実空間を観察する際の視点となります.
デバイスの先端部を識別し信号としてサブPCへ,またサブPCから信号を受けて振動子を作動させる汎用入出力ボードです.
掃除機の吸引音などの効果音を再生します.また,RBIOから得た先端部識別信号をメインPCに送り,メインPCからは振動子を作動させる信号を受信します.
メインPCから信号を受けてBGMを再生します.
内蔵のカメラが撮影した実空間に仮想物体を重畳描画します.
磁気センサによりHMDとデバイスの位置姿勢を取得します.
客観視点用にはカメラが撮った実空間に,仮想物体を合成した映像を映します.
主観視点用にはHMDが撮った実空間に,仮想物体を合成した映像を映します.